Выберем способ местоопределения. Наиболее широкое распространение получили графический, аналитический и итерационный способы. Наглядным является графический способ решения навигационной задачи на поверхности [14-16].
7.5.1 Графический метод решения навигационной задачи по измеряемым дальностям на плоскости.
Каким-либо способом определяются дальности навигационных приёмников от трёх навигационных точек d1, d2 и d3 , имеющих известные координаты xj, yjв Декартовой системе координат.
1) Строится графическое представление Декартовой системы координат.
2) Задается масштаб по осям абсцисс и ординат 50 км = 1см.
3) На график наносится местоположение навигационных точек.
4) Из заданных положений навигационных точек проводятся отрезки пересекающихся окружностей с радиусами d1, d2 и d3.
5) Точка пересечения построенных пересекающихся отрезков окружностей будет соответствовать местоположению приёмника (метод засечек).
6) Координаты приёмника определяются по проекциям точки пересечения построенных линий на осях Декартовой системы координат.
7.5.2 Графический способ решения навигационных задач в трёхмерном пространстве.
Допустим, что потребитель определил своё удаление d1 от единственной НТ1. Для определения своего местоположения потребитель использует Декартовую систему координат для плоскости с ортогональными осями X и Y, направленными на восток В и север С соответственно. Тогда потребитель может изобразить на плоскости окружность с радиусом d1 , центр которой размещен в координатах геометрической точки НТ1. По единственной сфере потребитель может сказать себе, что он находится в какой-то неизвестной точке на сфере.
По измерениям удаления от трёх навигационных точек потребитель определяет свои координаты в пространстве.
Значит, для определения координат и высоты расположения потребителя навигационная системы должна иметь как минимум три навигационные точки. Правда в этом случае ещё не решается задача учета временного сдвига синхрогенераторов приемника и передатчиков. Эту задачу можно решить включением в навигационную систему четвертой навигационной точки НТ4. Тогда также методом итерации с добавлением или вычитанием времени расхождения синхрогенераторов задача местоопределения решается полностью.
Итак, для решения любых задач навигации система должна обладать четырьмя навигационными точками. Тогда решается пространственная задача с определением и высоты расположения приёмника над уровнем моря.
Описанный выше метод называется параболическим методом определения местоположения.
7.5.3 Аналитический способ решения задач навигации.
Исходные параметры для расчётов удаления приёмника R от навигационной точки Т можно представить следующим образом.
В полярной системе координат удаление приёмника от передатчика dопределяется из разности векторов OТ-OR находим:

где g - угол между приёмником и передатчиком,

ОТ= RÅ+hТ, OR= RÅ + hR.
Зная координаты ИСЗ в геоцентрической системе, можно вычислить значения азимута А и угла места g для любой точки размещения ЗС. Если считать Землю идеальным шаром, возвышение станции над уровнем моря нулевым, а спутник расположенным в плоскости экватора с периодом, точно равным звездным суткам (геостационарный ИСЗ), то азимут и угол места для луча антенны ЗС можно вычислить по формулам:
 ;
;

где lc— долгота подспутниковой точки спутника в относительной геоцентрической системе координат;
H» 42 170 км — высота орбиты над центром Земли;
R= 6371 км — радиус Земли;
k = 0 при gN<0, lc>lN;
k = 2 при jN< 0, lc<lN;
k = 1 при jN>0.
По определенному значению угла места можно найти границу зоны видимости ИСЗ. Эта граница определяется условием g>0.
В декартовой системе координат эта задача выражается в виде системы четырёх уравнений, описывающих окружности с центрами, расположенными в навигационных точках. Произведём преобразование полярных координат в составляющие декартовой системы. Здесь мы имеем:
OA=OB=RÅ - средний радиус Земли = 6371 м;
hR= AR иhS = BТ – высоты приёмника и навигационной точки над поверхностью Земли;
X, Y, Z – оси ортогональных геоцентрических (декартовых) координат;
ZТ= (hТ+ RÅ)×sinjТ;
LТ = ( hТ + RÅ)×cosjТ;
ZR= (hR+ RÅ)×sinjR;
LR= ( hR+ RÅ)×cosjR;
XТ=LТ×coslТ;
YТ=LТ×sinlТ;
XR=LR×coslR;
YR=LS×sinlR,
где j и l - широта и долгота;
Z и L – проекции векторов на вертикальную ось и экваториальную плоскость геоцентрической декартовой системы координат.
Для определения теперь уже трёх искомых значений осевых проекций ХR, YR, ZR точки Rпонадобится решать систему из четырёх уравнений:
 ,i=1, 2, 3, 4.
,i=1, 2, 3, 4.
7.5.4 Разностно-дальномерные РНС.
Разностно-дальномерные РНС, относящиеся к радиотехническим системам дальней навигации, определяют навигационный параметр р= dA-dB, где dA и dB - расстояния объекта от двух РНТ.
В качестве параметра можно взять разность расстояний от подвижной точки до двух неподвижных. Получаем разностно-дальномерное устройство. В простейшем случае радиопередатчики опорных точек должны излучать синхронно радиоимпульсы, а на подвижной точке следует иметь приёмник и измерять интервал времени между моментами приёма двух сигналов. Уравнение параметра dБ -dA =c(t - tk) = 2a.
Поверхностью положения будет гиперболоид, образованный вращением гиперболы вокруг оси ОХ.
(x/a)2-(y/b)2-(z/b)2=1
b= [(d/2)2– a2]1/2,
где а и b - полуоси.
Поскольку d/2<a, то полуоси действительные. При разных значениях параметра получим семейство гипербол.
При увеличении расстояния гипербола стремится к асимптоте y = ±bx/a.
Положение асимптоты можно характеризовать углом (q), отсчитывая его от перпендикуляра к базе. Тогда уравнение запишем так: y = ±bx/a = xctgq .
Описанный выше метод называется гиперболическим методом определения местоположения.
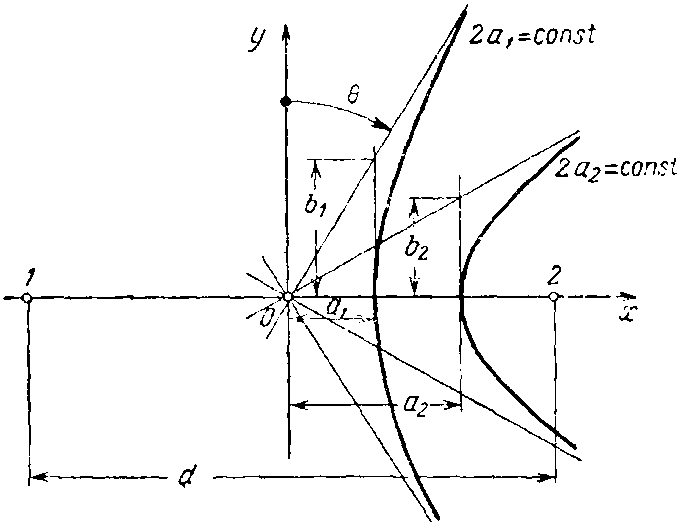
Рисунок 7.1 - Линии положения на плоскости разностно-дальномерного устройства






