|
Если в результате эксплуатационных испытаний получен некоторый статистический материал о величине в виде достаточно большого числа n различных случайных значений xi,, изучаемой величины X, то совокупность ( x1, x2, x3, xn) называется статистической выборкой.
По имеющимся значениям статистической выборки можно:
·получить аналитическую зависимость неизвестной плотности вероятности f(x) или F(x);
· оценить неизвестные параметры Mx – математическое ожидание случайной величины и Dx – дисперсию дискретной, случайной величины.
Математическая обработка статистической информации о надежности производится в следующем порядке:
1. Из статистического ряда составляется вариационный ряд, при этом случайные реализации xi записываются в порядке их возрастания и одинаковые значения не исключаются, а повторяются друг за другом.
2. Определяется размах варьирования R:
| |
R=Xmax ----Xmin. . .
|
|
3. Значение интервала группирования рассчитывается по формуле
где n – число членов вариационного ряда.
Полученное Δx округляют до ближайшего целого числа.
4. Количество интервалов группирования K рассчитывается по зависимости
| |
 K = R Δx K = R Δx
|
(18) |
и полученное число округляется до ближайшего целого (при вычислениях K выбирается из ряда чисел 7, 11, 13, 15, 17 и т.д.), а затем уточняется х.
5. Подсчитывается количество ni тех значений X = xi, которые попали в интервал длиной х, и далее составляется таблица с указанием номера i-го интервала (по мере возрастания значений xi) и чисел  ni для этих интервалов: ni для этих интервалов:
| |
|
... |
I |
... |
K |
... |
å |
| ΔX1
|
ΔX2
|
… |
ΔXi
|
… |
ΔXk
|
… |
 |
 |
 |
… |
 |
… |
|
… |
 |
По данным таблицы строится график (рис. 4).
Рис. 4. Полигон случайных чисел
Объем статистических данных (число n) должен быть достаточно большим, чтобы обеспечить требуемую точность расчета исходя из того, что при варьировании всеми переменными при изменении K в пределах от 10 до 20 в каждом Dxi должно быть Dn = 5-10 значений xi. Для удобства расчетов интервалы Dxi выбирают одинаковыми.
6. Плотность вероятности случайной величины f(x) определяется
где: xi – середины интервалов; ni – значение отказов в i-м интервале; x – величина интервала; n – общее число отказов.
По результатам экспериментальных данных вычисляем значения плотностей вероятности случайных величин. Удобной формой представления плотности вероятности будет гистограмма частот – это столбчатая диаграмма, являющаяся совокупностью смежных прямоугольников, площадь каждого из которых пропорциональна частоте нахождения данной величины в изучаемой совокупности (рис. 5).
Рис. 5. Гистограмма частот случайных величин
При этом по оси (Y) откладываются f(xi), а по оси (X) – х1, х2, х3, хk значения середины интервалов разбиения. Для удобства построения графика, показанного на рис. 5, заполняется таблица:
| x1
|
x2
|
x3
|
... |
xi
|
... |
xk
|
| f1(x) |
f2(x) |
f3(x) |
… |
fi(x) |
… |
fk(x) |
Чем меньше x и больше n, тем точнее гистограмма. Она по форме приближается к функции f(x). Основное свойство этой гистограммы состоит в том, что сумма площадей ее прямоугольников равна единице, то есть при x®0 и å ni®n, åfi(x) · x = 1 = F(x).
Здесь F(x) является функцией распределения случайной величины X.
Для изучения распределения случайных величин в математической статистике пользуются рядом числовых характеристик, определяющих положение центра группирования случайной величины и ее рассеивание около этого центра (эти характеристики называются математическим ожиданием случайной величины и дисперсией).
Математическое ожидание дискретной случайной величины Mx(она еще называется средневзвешенным значением) определяется по зависимости:
где: n – число возможных значений случайной величины, x, xi – возможные значения исследуемой дискретной величины, p(xi) – соответствующая вероятность значений xi.
Дисперсией дискретной случайной величины называется сумма произведений квадратов отклонений случайной величины x от ее математического ожидания на соответствующие вероятности, и она определяется по зависимости:
| |
DX = Σn(xi – Mx )2p(xi). |
(21) |
|
| |
|
σ = + √DX..
|
(22) |
| |
|
|
|
|
|
|
Дисперсия имеет размерность, представляющую собой квадрат размерности самой случайной величины. На практике это неудобно. Поэтому в технике чаще пользуются средним квадратичным отклонением:
Размерность s совпадает с размерностью самой случайной величины х.
|


 .
. следовательно,
следовательно,  ; при t®¥ Nот= N0,
; при t®¥ Nот= N0,  , Р(t) = 0.
, Р(t) = 0. ,
, .
.

 ,
,
 .
.

 .
. ,
, ,
, .
.
 .
.


 . (12)
. (12)
 Pc(t)=[1-θ1(t)][1-θ2(t)], [1 θn(t)]≈1[θ1(t)+θ2(t)+θn(t)]
Pc(t)=[1-θ1(t)][1-θ2(t)], [1 θn(t)]≈1[θ1(t)+θ2(t)+θn(t)]
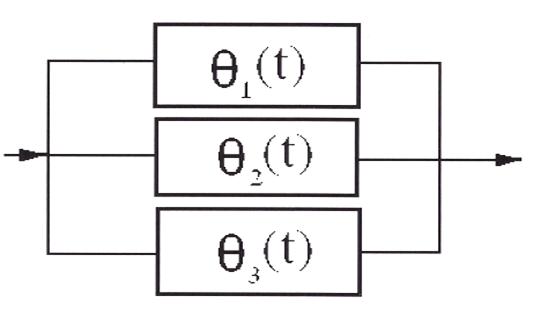
 (t) = θ3(t) = θn(t),θc(t) = θ1n(t) и тогда
(t) = θ3(t) = θn(t),θc(t) = θ1n(t) и тогда
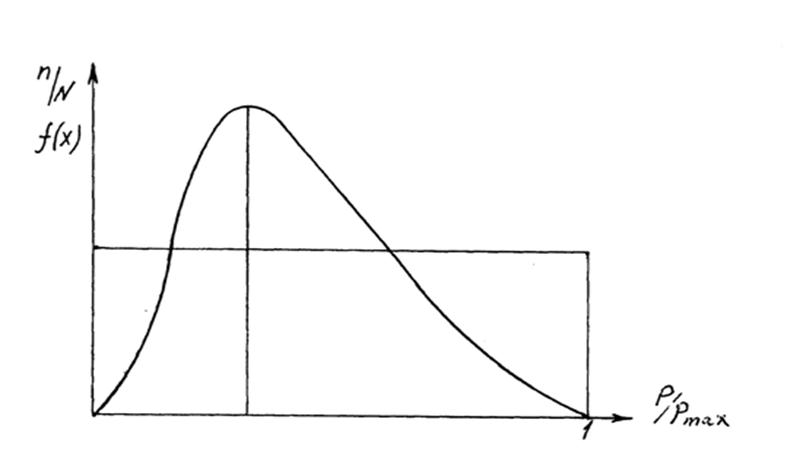 Рис. 6. Кривая относительного изменения нагрузки. Для вновь создаваемых машин эту функцию можно рассматривать как плотность вероятности (плотность распределения) f(x); · затем строят функцию распределения F(x) (рис. 7), причем функции F(x) и f(x) связаны известным соотношением f(x) = F’(x). Функция f(x) показывает вероятность работы с каждым значением нагрузки, а площадь, очерчиваемая кривой функции распределения, равна единице.
Рис. 6. Кривая относительного изменения нагрузки. Для вновь создаваемых машин эту функцию можно рассматривать как плотность вероятности (плотность распределения) f(x); · затем строят функцию распределения F(x) (рис. 7), причем функции F(x) и f(x) связаны известным соотношением f(x) = F’(x). Функция f(x) показывает вероятность работы с каждым значением нагрузки, а площадь, очерчиваемая кривой функции распределения, равна единице.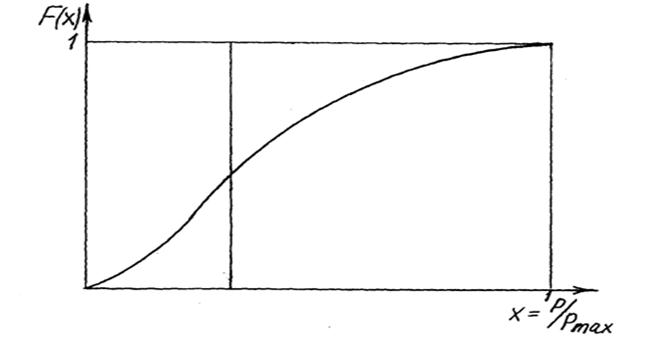
 Рис. 8. Типовые (расчетные) режимы работы машин. Динамические нагрузки всегда возникают при работе машины. Большинство машин работает в условиях прерывистого рабочего процесса, и динамические нагрузки неизбежно связаны с разгоном, торможением и реверсированием. Все механизмы возвратно-поступательного и периодического движения (кривошипно-ползунные, кулисные) работают в динамическом режиме нагрузок. Большинство динамических нагрузок возникает из-за недостаточной уравновешенности быстровращающихся деталей. Так, смещение на 0,1 мм центра тяжести от оси вращения ротора, вращающегося со скоростью n = 3000 об/мин, приводит к возникновению центробежной вращающейся силы, равной силе тяжести ротора, действие которой многократно опаснее действия самой силы тяжести. При вращении вала на подшипниках скольжения возникает нестабильная работа (вал “плавает”, возможны вибрации), а при установке валов на подшипниках качения без натяга возникает проскальзывание тел качения, повышается износ.
Рис. 8. Типовые (расчетные) режимы работы машин. Динамические нагрузки всегда возникают при работе машины. Большинство машин работает в условиях прерывистого рабочего процесса, и динамические нагрузки неизбежно связаны с разгоном, торможением и реверсированием. Все механизмы возвратно-поступательного и периодического движения (кривошипно-ползунные, кулисные) работают в динамическом режиме нагрузок. Большинство динамических нагрузок возникает из-за недостаточной уравновешенности быстровращающихся деталей. Так, смещение на 0,1 мм центра тяжести от оси вращения ротора, вращающегося со скоростью n = 3000 об/мин, приводит к возникновению центробежной вращающейся силы, равной силе тяжести ротора, действие которой многократно опаснее действия самой силы тяжести. При вращении вала на подшипниках скольжения возникает нестабильная работа (вал “плавает”, возможны вибрации), а при установке валов на подшипниках качения без натяга возникает проскальзывание тел качения, повышается износ.




